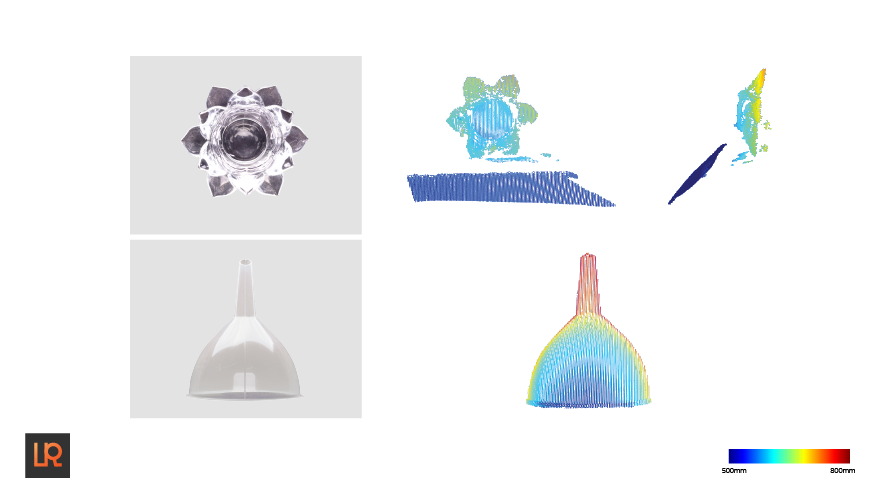
3D Imaging Technology
Novel industrial 3D imaging systems for moving and transparent objects.
3D Sensing and Perception
Robust, efficient and learning-based 3D visual sensing and perception solutions for logistics scenarios.
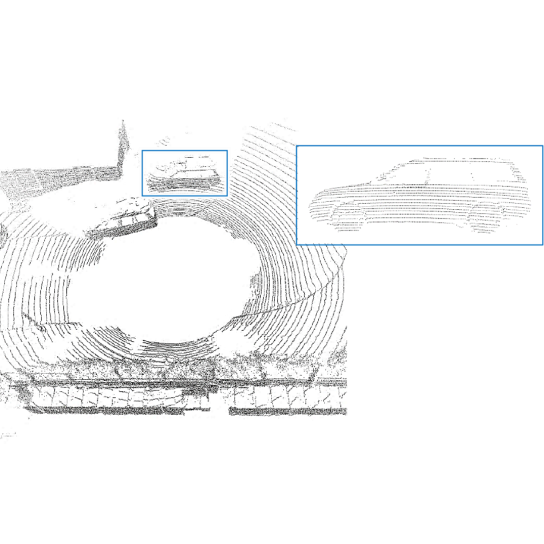
Point-Cloud Upsampling and Consolidation
Produce high-quality point-clouds with uniform point distribution and also facilitate high-quality 3D mesh reconstruction.
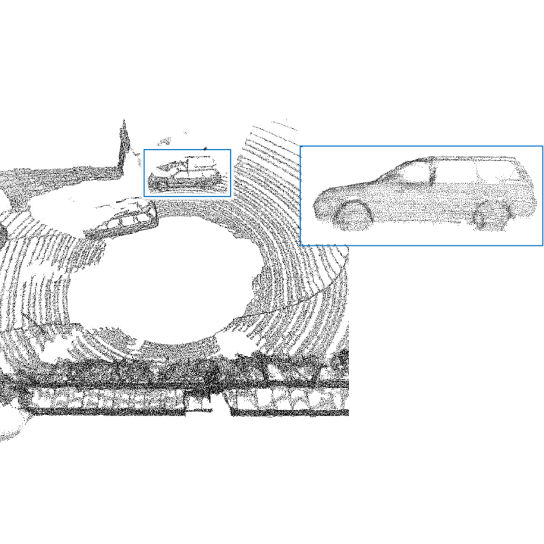
sparse input
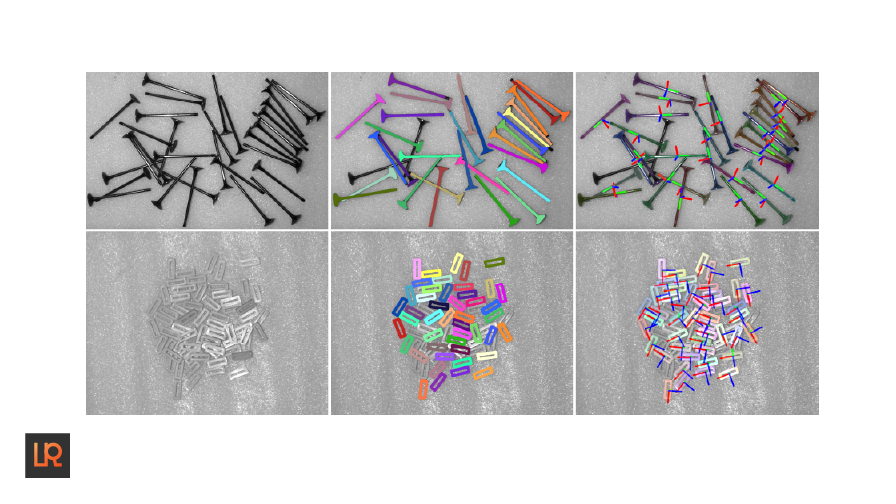
3D Point-Cloud Semantic and Instance Segmentation
Develop algorithms for both semantic and instance segmentation with high accuracy and real-time efficiency.