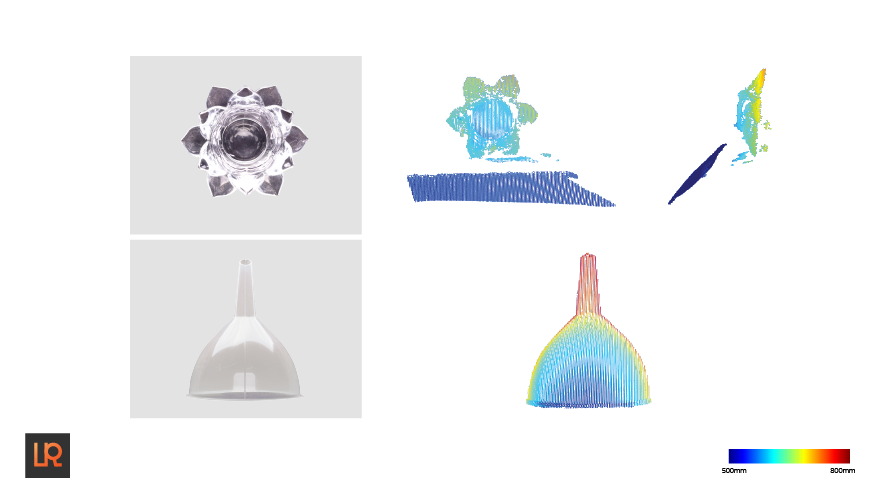
三維成像技術
專為特殊材質與運動物體而設的新型工業三維成像系統。
三維傳感與感知
穩定、高效和基於學習的三維視覺傳感與感知解決方案,適用於多種物流作業環境。
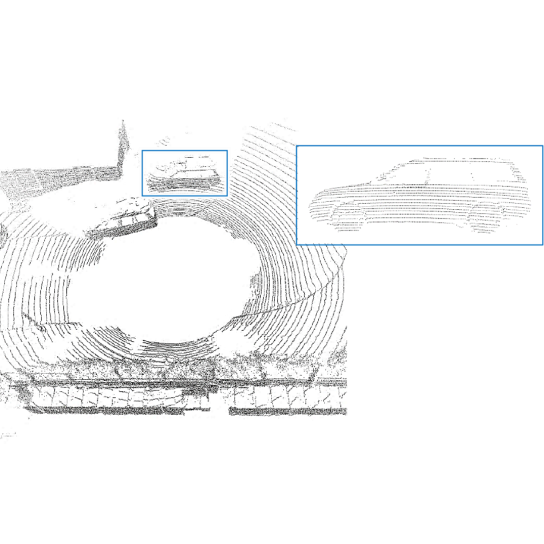
點雲上採樣與增強
利用深度學習型神經網絡生成高品質均勻分佈的點雲資料,同時輔助精準三維網格的重建。
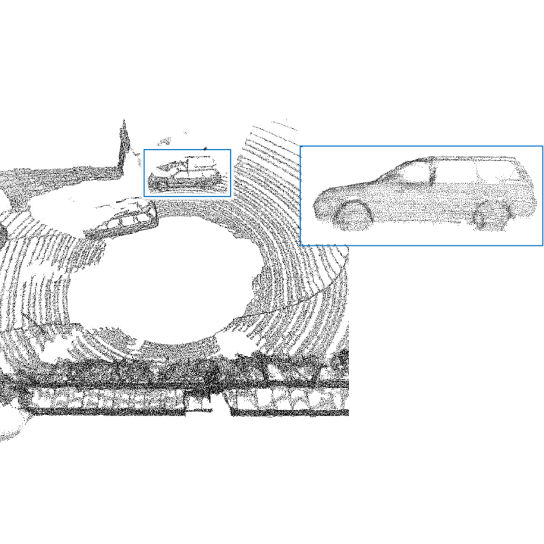
sparse input
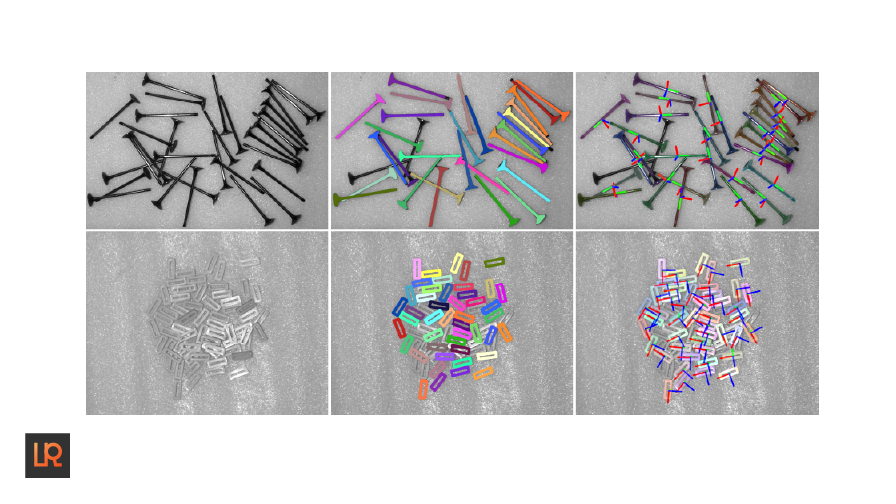
三維點雲語義與實例分割
開發高精度與實時點雲「語義」與「實例」分割演算法。