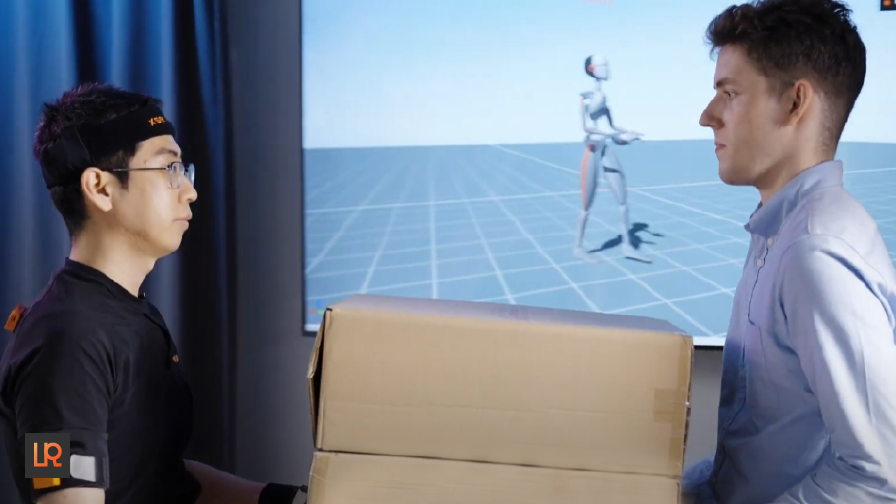
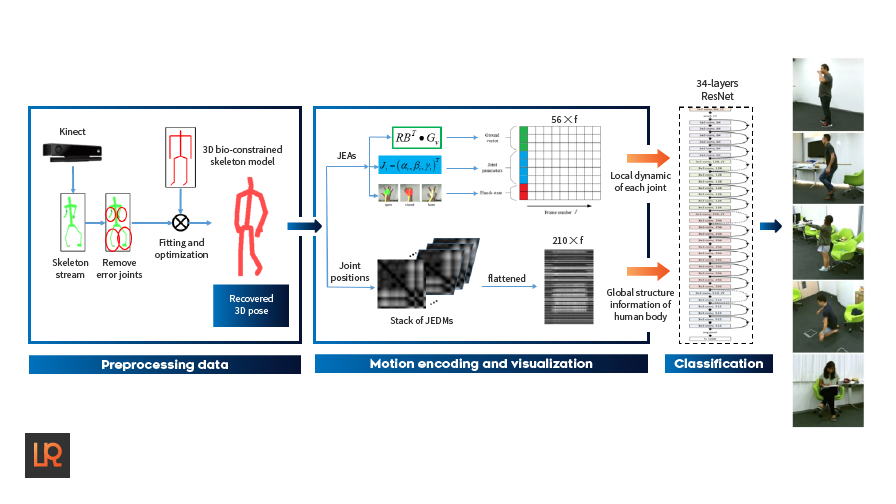
人類是機械人學習的完美模型。由於人類技能的教與學可在多個行業應用,多年來一直有大量相關的學術研究。本項目旨在建立人類行動理解與機械人智能控制的理論框架。了解人類的行動是任何人機互動系統的基本要素,這樣機器械人就可以模仿人類的靈活技巧或者作出智能反應,爲人類提供更好的服務。本項目的成果將成爲驅動機械人與物流業人員進一步緊密合作的關鍵技術。
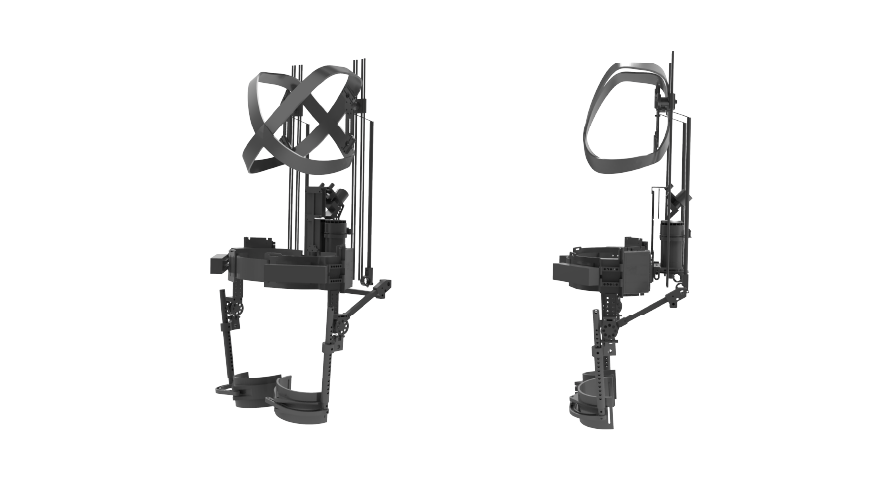
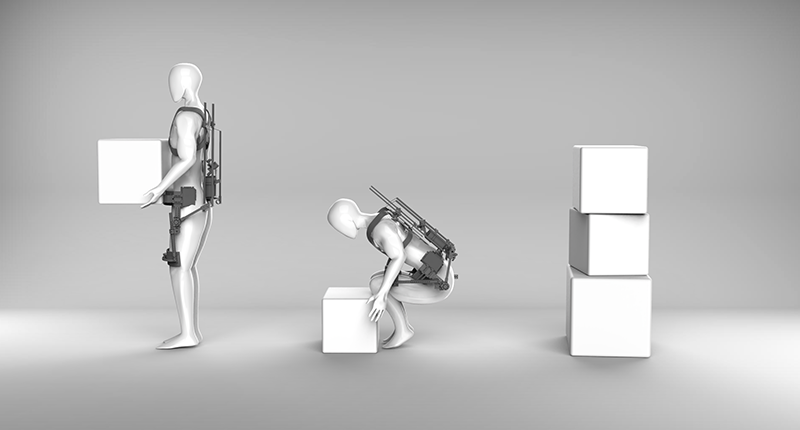
本中心正研發一種穿戴式機械外骨骼,協助員工在物流作業中進行負載運輸。結合新式技術與研究,並經過多項測試,以實現人機協作。外骨骼採用三維生物力學與人體工學模型設計、配備新穎的線驅動串聯平行彈性執行器,為使用者提供安全與舒適的穿戴體驗。設計還配備智能控制,對用家更為便利。機械控制器更把用家的不同動作進行偵測及分類,以便爲用家提供及時的反饋與準確的輔助力矩。